Blog
Pick & Place processes are automation solutions that enable the setup of a complete automation process by extending, e.g., an optical measurement system with a robot arm to automatically pick, place, measure, and sort components. Pick & Place is usually based on the interaction between
1) an administrator who pre-defines the automation process,
2) a collaborative robot for the placing of components, and, like in our case,
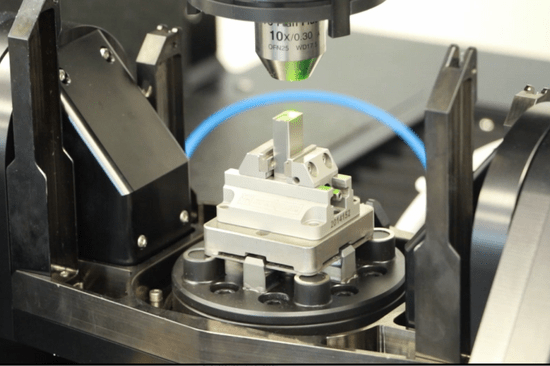
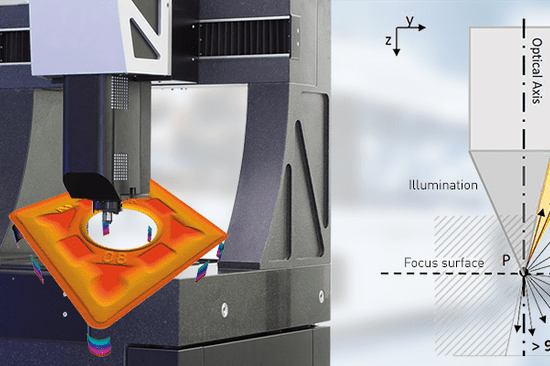
3) a high-resolution optical 3D measurement system.

Automated measurement solution Pick & Place with the optical µCMM
Pick & Place can also be used in conjunction with machine tools. Here, the machined component is removed from the machine by the robot, clamped on the measuring system and measured automatically. Depending on the manufacturing strategy, users can choose from different options of how to continue with the production process afterwards: Either the measurement result is fed back into the machine tool following a closed loop strategy, where machine parameters are corrected automatically and manufacturing continues in a self-controlling manner. Or an automatic sorting into OK/NOT OK pallets follows the 3D measurement for further processing.
Want to see how this works in practice? Watch the video and see here how the optical coordinate measuring machine µCMM can be extended with a collaborative robot arm.
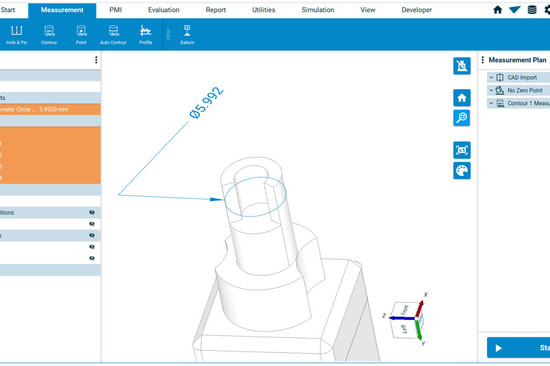
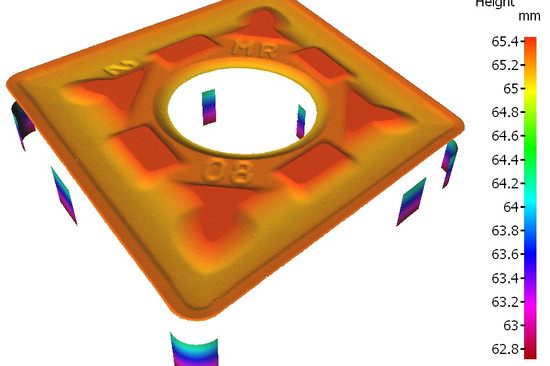
Or read the measurement report about a 3-up stamping insert that is measured with the µCMM and the Real3D rotation unit.
-550x366.jpeg)

die_Sonne-550x366.png "Bruker Alicona at AMB 2024 in Stuttgart")




_Nagel-550x366.jpg)

-1024x563-550x366.jpg)
dieSonne-065-868x397-550x366.jpg)

dieSonne-120-550x366.jpg)




dieSonne-137-550x366.jpg)


dieSonne-(10)-2076x1706-550x366.jpg "Optical Measuring Principles at a Glance")

dieSonne-web-(102)-550x366.jpg "Rotation and tilt unit Real3DUnitX")
-550x366.jpg "knee implant measurement")
dieSonne-(23)-1706x1708-550x366.jpg "Key Regions of Turned Parts, Stamped Parts, Round Tools measured")
dieSonne-(01)-2277x1706-550x366.jpg "Production Metrology")

dieSonne-web-(21)-550x366.jpg "Turbine Blade with Cooling Holes")




dieSonne-(9)-550x366.jpg "Alicona Imaging GmbH goes Bruker Austria GmbH")

-1536x1536-550x366.jpeg)




-550x366.jpeg)


dieSonne-268-550x366.jpg)